Modern robotların tarihi, 1950 yıllarında başlar ve günümüzde bu konudaki gelişme hızla devam etmektedir. 1954 yılında George Devol, kendi geliştirdiği ve “Programlanan Nesne Transferi” adını verdiği bir buluş için patent başvurusunda bulunur. Bunu üretmek için girişimci bir ortak aramaktadır. Sonunda Columbia Üniversitesi mezunu girişimci bir mühendis olan Joseph Engelberger ile tanışır ve ismin robot olarak değiştirilmesine karar verirler. Unimation adında bir firma kurarak Unimate modelini üretmeye başlarlar. Unimate ilk endüstriyel robottur. İlk Unimate hidrolik güç mekanizmasına sahiptir. Sayısal kontrol, manyetik davul bellekli, ayrık katı hal (elektronik) kontrol bileşenleri kullanılmıştır. İlk Unimate 1961 yılında General Motors fabrikasında, sıcak kalıp döküm makinesine yardımcı olarak kullanılır. Unimation firması, kısa zaman içinde kaynak vb işleri yapan robotlar geliştirir.
1955 yılında”Yapay Zeka” terimi ilk kez John McCarthy tarafından kullanılır.
1958 yılında Jack Kilby, Texas Instruments şirketinin laboratuvarında ilk entegre devreyi üretir. Bu, endüstride bir devrin başlangıcıdır. Günümüzde, tırnak büyüklüğünde bir alana milyonlarca devre elemanı sığmaktadır. Entegre devrenin bulunuşu robotik alanındaki ilerlemeyi kat kat arttırmıştır.
1960 yılında Harry Johnson ve Veljko Milenkovic, Versatran (VERSAtile TRANsfer) adını verdikleri, programlanabilir robotu üretirler. Versatran’ın sürekli yörüngede çalışan modeli olduğu gibi noktadan noktaya çalışanı da vardır. 1972 yılında Silent Running adlı filmde de yer almıştır. 1967 yılında, Japonya tarafından ilk ithal edilen robot Versatran olmuştur.
1967 yılında Ralph Mosher, Walking Truck (yürüyen kamyon) adını verdiği dört ayaklı robotu General Electric firmasında tasarlar. Robotun içinde sürücüsü vardır, zorlu yollar için tasarlanmıştır. Sürücü kamyonun içinde yürüdükçe, kamyon da arazide yürür. 250 kg kadar yük taşımakta, saatte 24 km kadar hız yapabilmektedir.
1968 yılında Unimation, kendi teknolojisinin lisansını Japonya’da Kawasaki Ağır Sanayi şirketine satar. Bundan sonra Japon robot endüstrisinde patlama yaşanır. 1990’a gelindiğinde, Japonya robot sektörünün öncüsüdür.
1966-1972 yılları arasında, Stanford Üniversitesi’nde bulunan Yapay Zeka Merkezi’nde Charles Rosen’ın ekibi Shakey adlı robotu geliştirir. Shakey, ilk mobil robottur.
Engellerin etrafından dolaşmakta, nesnelerin yerini değiştirmek gibi basit işleri yapabilmektedir. Shakey kendi kararlarını kendisi veren, otonom bir robottur.
1969 yılında Vic Scheinman, Stanford Üniversitesi’ndeki yüksek lisans öğrenimi sırasında, tamamı elektrikle çalışan, altı eksenli, eklemli Stanford kolu geliştirir. Endüstriyel robotların daha karmaşık işlerde kullanılmasını sağlayan bu kol, ileride geliştirilerek montaj için programlanabilir evrensel makine adını alır.
1971 yılında Richard Hohn, Cincinnati Milacron firmasında T3 (The Tomorrow Tool, yarının aleti) isimli ilk mikroişlemci kontrollü endüstriyel robotu üretir.
1972 yılında Shigeo Hirose, ilk yılansı robotu yapar. Hirose’nin geliştirdiği robotlar yürür, sürünür, yüzer ve tırmanır. Yedi tonluk ninja robotu, toprak kaymasını önlemek için dağlara tırmanarak civata takmaktadır. Hirose, Birleşmiş Milletler için uzaktan kumandalı kara mayını temizleyen robot projesinde de yer almaktadır.
 1973’te Ichiro Kato, Tokyo Üniversitesi’nde insan boyundaki ilk insansı robot olan Wabot-1‘i yapar. Wabot-1, hareket kontrol sistemi, görme sistemi ve konuşma sisteminden oluşmaktadır. Japonca konuşabilmekte ve nesnelere olan uzaklıkları ölçebilmektedir. Yürüyebilmekte, dokunma sensörü bulunan elleriyle nesneleri kavrayıp taşıyabilmektedir. Wabot-1’in zihinsel yaşının 1.5 yaşındaki bir bebeğe eşdeğer olduğu tahmin edilmektedir.
1973’te Ichiro Kato, Tokyo Üniversitesi’nde insan boyundaki ilk insansı robot olan Wabot-1‘i yapar. Wabot-1, hareket kontrol sistemi, görme sistemi ve konuşma sisteminden oluşmaktadır. Japonca konuşabilmekte ve nesnelere olan uzaklıkları ölçebilmektedir. Yürüyebilmekte, dokunma sensörü bulunan elleriyle nesneleri kavrayıp taşıyabilmektedir. Wabot-1’in zihinsel yaşının 1.5 yaşındaki bir bebeğe eşdeğer olduğu tahmin edilmektedir.
1977 yılında çevrilen Star Wars (Yıldız Savaşları) filminin androidi C3PO ve mobil robotu R2D2’nun yarattığı yankı sonucunda 1980’lerde Japonya’da benzerleri evleri süpürür, şarkılar söyler olmuşlardır.
1979 yılında, Hiroshi Makino’nun ekibi tarafından Yamanashi Üniversitesi’nde Scara robot kolu tasarlanır. Bu kol, montaj endüstrisinde yepyeni bir soluk olur. Tekrarlı montajları son derece hızlı ve hatasız yapabilmektedir.
1983 yılında Steve Bartholet tarafından Odetics firmasında tasarlanan altı ayaklı, 136 kg ağırlığında, üzerindeki bilgisayar uzaktan da kontrol edilebilen ve kendi gücüyle hareket eden Odex 1 robotu tanıtılır. Robot, kendi boyunu istediği şekilde uzatıp kısaltma, dar yerlerden geçerken incelme özelliğine sahiptir. Her bacak 180 kg kaldırabilmekte, normal yürüme hızında toplam 400 kg yük taşıyabilmektedir.
1984 yılında Joseph Engelberger, hastane robotları üretmek için HelpMate isimli firmayı kurar ve ilk HelpMate robotu 1988’de Connecticut’taki Danbury Hastanesi’ne yollanır.
1985 yılındaYik San Kwoh, California’daki Long Beach Memorial Medical Center’da bilgisayarlı bir robot kolu, beyin ameliyatında yardımcı olarak kullanır. Robot kol, biyopsi iğnesi ve ameliyat matkabını kullanmak konusunda yardımcı olur. Robot kolun hassasiyetle iş yapabilmesi, genel anestezi gereğini ortadan kaldırıp, beyindeki travmayı azaltarak, hastanın ameliyatın ertesi gün evine dönebilmesine olanak sağlamıştır. Klasik yöntemlerle yapılan ameliyatlarda, ameliyattan sonra hastanede bir hafta, bazen daha da uzun süre kalmak gerekmektedir.
 1986 yılında Honda firması, gizli bir insansı robot projesi başlatır. 1996’da P2 robotu tanıtılır. Bu çalışmalar sonunda dünyaca ünlü Asimo’nun üretimine kadar ilerler. Asimo, 2000’de halka tanıtılır. 130 cm boyunda, 48 kg ağırlığında, saatte 6 km hızla koşabilen bir robottur. Asimo, görme, konuşma, ses tanıma gibi pek çok özellikleri dolayısıyla, insanlarla iletişim kurabilen bir robottur.
1986 yılında Honda firması, gizli bir insansı robot projesi başlatır. 1996’da P2 robotu tanıtılır. Bu çalışmalar sonunda dünyaca ünlü Asimo’nun üretimine kadar ilerler. Asimo, 2000’de halka tanıtılır. 130 cm boyunda, 48 kg ağırlığında, saatte 6 km hızla koşabilen bir robottur. Asimo, görme, konuşma, ses tanıma gibi pek çok özellikleri dolayısıyla, insanlarla iletişim kurabilen bir robottur.
1990 yılında William Bargar ve Howard Paul, tasarladıkları Robodoc isimli robotla bir köpeğin kalça kemiğini değiştirirler. Aynı ameliyatı 1992’de insan üzerinde gerçekleştirirler.
1993 yılında Rodney A. Brooks, MIT (Massachusetts Institue of Technology)’de Cog adını verdiği robotu üretir. Cog, diğer robotlardan farklıdır, insan davranışlarına ve tavırlarına yakınlık hedeflenmiştir. Cog, insan gibi eğitilen ve yetiştirilen, insanlarla olan etkileşiminden öğrenen bir robottur.
1994 yılında Carnegie Mellon Üniversitesi’nin robotu Dante II, Alaska’daki aktif bir volkanı keşfe çıkar, volkanik gaz örnekleri toplar. 1993’te bu işi yapmaya çalışan sekiz bilim insanı iki ayrı volkanda hayatlarını kaybetmişlerdir. Robotların devreye girmesiyle, zorlu arazilerde uzaktan araştırma ve keşif yapmak kolaylaşmaktadır.
1997 yılında Nasa’nın projesi olan Mars Pathfinder’ın bir parçası, Sojourner rover (gezginci), kendisinden beklenenin 12 katını gerçekleştirerek, uzun bir süre çalışır ve Pathfinder’a en uygun rotayı planlayarak yardımcı olur. Ayrıca 550 görüntü alarak Mars’ın o andaki ve geçmişteki durumu hakkında bilgi edinilmesini sağlar.
1997 yılında her yıl robotik ve yapay zekanın sınandığı platform haline gelecek olan RoboCup futbol turnuvası Nagoya, Japonya’da başlar.
2001 yılında, Canadian Space Agency (Kanada Uzay Kurumu) tarafından, Canadarm2 adlı robot kol, International Space Station (uluslar arası uzay istasyonu) ile birlikte dünyanın yörüngesine ve yerden 70 km yükseğe yerleştirilir. Canadarm2, 1641 kg ağırlığında ve 17 m uzunluğundadır, 19 kat karbon fiber termoplastikten üretilmiştir. Yapısı insan koluna benzemektedir. Görevi, uzay istasyonunda gerekli onarımlara yardım etmek ve kumandasız kargo gemilerini, hatta astronotları yakalamak ve istasyona çekmektir. Bu görevi başarıyla yerine getirmiştir. On yıl içinde 2.4 milyar km yol kat etmiştir. Bu mesafe, Güneş ile Satürn arasındaki mesafenin 1.5 katıdır.
2001 yılında insansız hava aracı olan Global Hawk, 22 saat aralıksız uçar, bu uçuş sırasında Pasifik Okyanusu’nu da geçer. Global Hawk ilk uçuşunu 1998 yılında gerçekleştirmiştir. Afganistan ve Irak savaşlarında kullanılmıştır.
2001 yılında Dünya Ticaret Merkezi saldırısında robotlar kurtarma çalışmalarında kullanılırlar.
2002 yılında elektrikli süpürge robotu Roomba, iRobot firması tarafından piyasaya sürülür. Roomba, günümüze dek milyonlarca eve ulaşmıştır.
2003 yılında ikiz araçlar Spirit ve Opportunity, Mars yüzeyini ve jeolojisini incelemek, bilgi toplamak ve elde ettikleri bilgileri iletmek üzere Mars’a gönderilirler. Çalışmaya 2004’te başlarlar. Spirit 2009’da takılır ve iletişimi keser. Opportunity ise hala çalışmakta ve dünyaya bilgi göndermektedir. Planlanandan (90 gün) çok daha uzun süre dayanmışlardır. Mars dışından gelen meteor kalıntılarını ve Victoria kraterini araştırmak görevleri arasındadır.
2005 yılında Cornell Üniversitesi’nin tasarladığı robot, kendi kendinin kopyasını üretir. Robotun tasarımı basittir ve sonuçlar da tartışmalıdır, ancak konunun gündeme gelmesi açısından önem taşımaktadır. Robotu oluşturan her bir plastik küpte mikroişlemci, motor ve elektromıknatıs bulunmaktadır. Küpler, köşegenden ikiye bölünür.
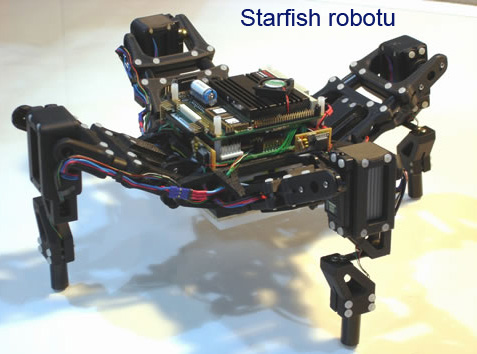 2006 yılında Cornell Üniversitesi araştırmacıları, deniz yıldızından esinlenerek tasarladıkları Starfish adlı robotu tanıtırlar. Starfish, önce düz bir yüzeyde yürüyüp, algılayıcılarıyla kendi hareketlerini algılamakta, elde ettiği bilgiyle kendini modellemektedir. Her hareketinde, kendi hakkındaki bilgiyi güncellemekte ve elde ettiği modeli gelecekteki hareketlerinde kullanmaktadır. Bacaklarından birisi arızalandığında, yürüyüşünü yeni duruma uyum sağlayacak şekilde değiştirmekte, dolayısıyla yaralanmaya karşı strateji geliştirmektedir.
2006 yılında Cornell Üniversitesi araştırmacıları, deniz yıldızından esinlenerek tasarladıkları Starfish adlı robotu tanıtırlar. Starfish, önce düz bir yüzeyde yürüyüp, algılayıcılarıyla kendi hareketlerini algılamakta, elde ettiği bilgiyle kendini modellemektedir. Her hareketinde, kendi hakkındaki bilgiyi güncellemekte ve elde ettiği modeli gelecekteki hareketlerinde kullanmaktadır. Bacaklarından birisi arızalandığında, yürüyüşünü yeni duruma uyum sağlayacak şekilde değiştirmekte, dolayısıyla yaralanmaya karşı strateji geliştirmektedir.
2007 yılında TOMY firması, eğlence robotu olan i-Sobot’u üretir. 16.5 cm yüksekliğindeki robot, dünyanın en küçük, seri üretilen, insansı robotudur.
2010 yılında Ekso firması, giyilebilir biyonik robot iskeleti üretir. Giysi, rehabilitasyon dönemindeki hastalara, yürümeyi yeniden öğretmek amacını taşımaktadır.
2011 yılında NASA, uzaya ilk insansı robotu, Robonaut 2’yi gönderir. Görevi, astronotlara işlerinde yardım etmek ve uzay istasyonun tamiratı ve bakımı ile ilgili işleri yapmaktır. Robotun geliştirilmesi halen sürmektedir.